
四足哺乳动物凭借其运动的灵活性和对复杂地形环境的适应性,极好的适应了环境的变迁得以繁衍不息。人类对于四足动物的仿生研究和应用也是源远流长——早在三国时期便发明了“木牛流马”用于户外运输和载重。而随着对于机器人研究的不断发展,四足机器人也逐渐成为当今研究的热点。今年以来,波士顿动力和云深处科技先后发布自己的新产品SpotMini和新“绝影”,更是推动四足机器人在行业和场景的落地应用。本文将主要分析四足机器人的发展历程、应用场景和关键技术,以及介绍四足机器人的主要玩家。
1.四足机器人发展历程
虽然早在三国时期便有“木牛流马”的传说,但世界上第一台现代意义上的四足机器人实际诞生于1968年,美国通用电气公司设计师Mosher在机动系统实验室设计了一辆名为Walking Truck的机器马,驾驶者可以通过人工操作指令杆来控制机器的液压驱动系统,实现该机器马抬腿、迈步以及跨越障碍等动作。到1976年,日本东京工业大学Shigeo Hirose教授首次研发出了具备自主行走能力的KUMO-I,被认为是世界上第一台功能全面的四足机器人。
随后,丰富运动步态、增加机器负载成为四足机器人的重要研究方向。随着高性能计算机的出现,1984年美国MITRaibert成功研发出新一代四足机器人,首次实现了trot,pace和bound三种步态。到2005年,美国波士顿动力公司推出的BigDog系列产品成为四足机器人发展的一个重要里程碑——BigDog首次将四足机器人的野外运输和负重变成可能。BigDog采用伺服液压缸作为其腿部的驱动器,配套了汽油发动机,成功地实现了雪地、冰面、瓦砾等复杂地面下的稳定性,且在受到侧向强扰动的情况下仍能保持平衡。
在驱动方式上,电机驱动逐渐代替液压驱动成为四足机器人的主要驱动方式。2007年意大利理工学院研发出的HyQ四足机器人,采用电机和液压混合驱动,能够实现在崎岖地形的稳定爬行和有腾空相的trot步态,并能在一定的外界扰动下保持稳定。到2012年,MIT成功研制出全电机驱动的四足机器人Cheetah,能够实现trot、bound以及gallop步态的仿真控制。
四足机器人的自主性和场景落地也是重要研究方向之一。2016年,ETH Zurich推出了新一代四足机器人ANYmal,该机器人被设计用于恶劣环境下的自主作业,其躯体上安装了激光传感器和摄像机,用以感知环境地形进行地图构建和自定位,能够自主规划导航路径并且合理选取落脚点,在携带电池的情况下自重不超过30kg,能完成2 小时自主巡检作业。而最新发布的“绝影”机器人也在加强其感知系统和自主决策能力。其搭载了用于定位的激光雷达,以及用于局部精细定位的摄像头,可以实现在工作区域实现环境地图的构建,自主导航和动态避障以及自主充电。基于自主导航和感知能力,四足机器人在安保、仓储物流、工程建设、应急响应等领域的场景落地逐渐成为可能。

四足机器人发展历程
总体而言,四足机器人在逐渐朝着步态多样、运行稳定、性能高效发展并逐渐通过感知技术的结合落地场景应用。
2.四足机器人应用场景
四足机器人的应用前景十分广阔,主要基于其在结构和性能上的优势。“经过近百年的努力也未能使轮式或履带式车辆在松软地面上的性能得到根本改进。”诚然,轮式或者履带车辆在相对平坦的地形上行驶时,具有控制简单、运动平稳快速的特点,但在松软地面或崎岖不平的地形上行驶时,车轮和履带的移动效率会大大降低甚至无法移动。与之鲜明对比的是,足式机器人尤其是四足机器人能够较好的适应这类非结构化和恶劣的环境:(1)在复杂环境中四足机器人相较轮式和履带式机器人依旧能以较低能耗实现高速运动——在坚硬不平整路面上,履带式速度为7-15km/h,轮式为4-9km/h,而足式动物最快的奔跑能够达到57km/h;在深软土质的地面上运行时,履带式消耗功率为7462W/T,轮式为11305W/T,而足式则能低到5220W/T;(2)足式机器人移动时对地表环境要求低,对地面破坏性小不影响环境。
移动机器人分类
基于四足机器人在性能和结构上表现出的优势,其主要应用场景可以在以下几个方面:
应用场景1:野外运输
四足机器人具备良好的负重能力(例如,中国兵器装备集团的“奔跑号”四足机器人最大负重可达160kg),同时能够在复杂的环境中灵活运动,因此四足机器人可以作为一种潜在的运输工具帮助人类完成野外的运输任务。
应用场景2:侦查救援
四足机器人的核心应用场景便是在危险和复杂的环境中,如地震灾区、战场边境等,帮助人类完成野外救援、安防巡检等任务。在这样的特种场景下,四足动物不仅有着比人类更强大的运动能力,同时也比履带式或者轮式机器人更好适应非结构化场景,是对现有履带式和轮式机器人在安保、仓储物流、工程建设、应急响应等应用场景的补充和替代。
从以上两个应用场景而言,四足机器人的潜在市场规模对应的是应对地震、洪涝灾害和极端天气,以及矿难、火灾、安防等公共安全事件的特种机器人市场。根据中国电子学会预测,预计2019年全国特种机器人规模将达7.5亿美元。其中,军事应用机器人、极限作业机器人和应急救援机器人市场规模预计分别为5.2亿美元、1.7亿美元和0.6亿美元。
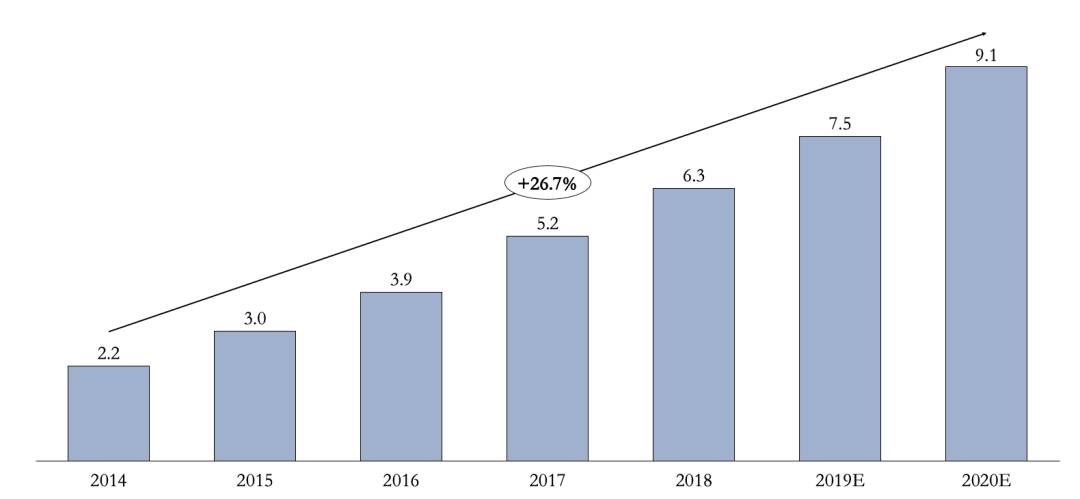
中国特种机器人市场规模预测(单位:亿美元)
当然,四足机器人目前仍处于早期阶段,距离规模化的场景应用仍然有一定距离,因此目前四足机器人的主要商用场景仍然是教学科研场景,主要面向高校机器人教学科研。根据简易测算,目前我国共有248所高校开设机器人专业,假设每所高校需要2台四足机器人用于教学科研,每台设备的市场价格区间在30万~100万人民币,则对应的国内市场规模在1.49亿元~4.96亿元。但更长远来看,四足机器人同样可以完成猫、狗等动物的行为,但却无需额外养育和训练。因此四足机器人可以作为潜在的服务型机器人,实现情感陪伴、特殊服务等功能,对应了20亿级美元的市场空间。
3.四足机器人关键技术
通过对四足机器人的技术拆解,其核心技术大体包括运动控制、仿生结构、环境感知和自主性等模块。四足机器人的控制规划是实现其运动性能的核心,仿生结构则是构成其运动能力的基础,而环境感知和自主性技术则是四足机器人能够自我控制的关键。

四足机器人核心技术
3.1仿生结构
实现四足机器人的仿生结构包括以下几个部位的设计和研发:身体支架、驱动控制、足腿部和足端设计。
关键技术1:支架设计
身体支架设计的核心目标在于可控前提下最大实现四足机器人的灵活度。目前四足机器人的主流身体支架设计分为主动腰部、被动腰部和刚性腰部结构。主动腰部结构通过在四足机器人的腰部安装驱动器,从而提高其灵活性和自由度,但也会增加机器人的控制难度和自重。而被动腰部则是在腰部安装被动弹性元件,虽然能够减少运动冲击和略微增加活动能力,但会给机器人带来干扰从而增加控制难度。刚性腰部则是简单的刚性连接,结构简单,控制难度低,成本低,但是自由度也弱。
关键技术2:驱动设计
四足机器人的主要驱动硬件结构包括主处理器、电控系统和关节驱动器。高性能的处理器、高动力的电机系统,以及高扭矩的关节模块是保证四足机器人能够正常驱动的硬件基础。目前市面上高性能的驱动控制模块仍然主要以国外企业生产为主,成本高昂,自主研发性价比更高的关节和电机驱动器是实现四足机器人成本降低的关键。
关键技术3:腿部设计
四足生物的腿部一般有髋、膝和踝3个关节。在四足机器人的足腿部设计中,会通过自由度的设计来模拟关节的运动。一般而言,会给髋关节2个自由度,用于实现机器人的左右横跨和前后摆动。踝关节同样也是拥有2个自由度,用于调节足端和地面的接触。而膝关节则只给前后摆动的1个自由度,防止腿部转动惯量过大以至于影响四足机器人的高速运动。
而四足机器人腿部关节配置形式一般有四种(全膝式、全肘式、外膝肘式和内膝肘式),各有优点。外膝肘式和内膝肘式配置的支撑面比较大,机器人稳定性较好;而全膝式和全肘式配置由于具有统一关节形式,控制相对简单。
关键技术4:足端设计
四足机器人的足端设计包括三种形式:圆柱形足端(含半圆柱形足端)、球形足端(含半球形足端)和仿生足端。圆形足端是目前四足机器人最常见的足端设计,足端呈球形或半球形,这种设计的优点是机器人足端可以和地面从各个方向接触,具有较强的环境适应性。但真正的四足动物足端是不规则的,有爪子和肉垫等结构,与地面接触时始终都有很强的抓地力,更为仿生的足端材料研发是迭代方向。
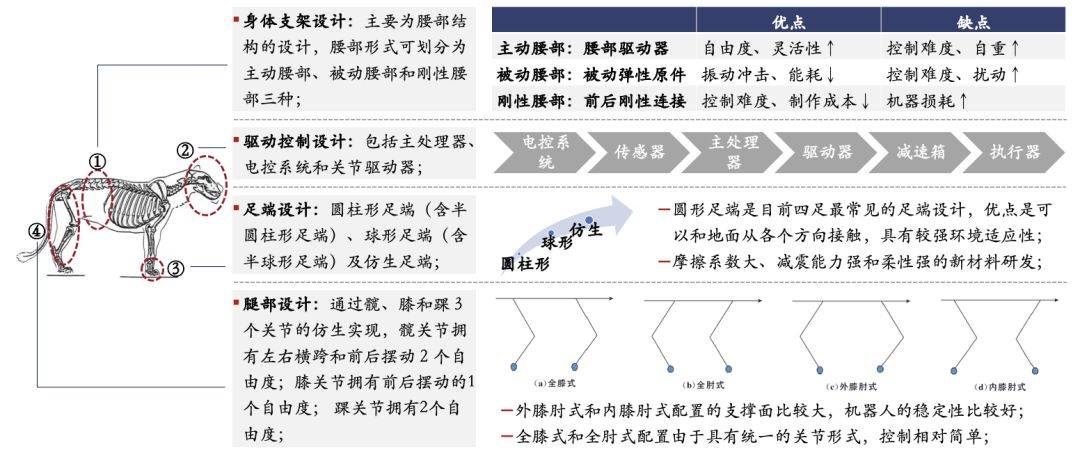
四足机器人仿生结构技术拆解
3.2运动控制
实现四足机器人的运动控制包括运动规划和运动控制两部分。
关键技术1:运动规划
保障四足机器人正常且灵活的步态是运动规划的目标。目前弹簧加载倒立摆理论(Spring Loaded Inverted Pendulum,SLIP)和线性倒立摆模型(Linear Inverted Pendulum Mode,LIPM)是实现四足机器人动步态行走的有效手段之一。除此之外,零力矩点(Zero Moment Point,ZMP)、中枢模式发生器(Central Pattern Generator,CPG)等也是比较成熟的运动规划模型。
弹簧加载倒立摆理论(Spring Loaded InvertedPendulum),是将四足机器人的单条腿简化为单自由度的具有柔性和阻抗的单杆结构。基于SLIP模型,机器人的步态相位可以分为飞行相和摆动相,并由此可以得到简化有效的机器人动力学模型,对机器人运动进行有效的规划。
线性倒立摆模型(Linear Inverted Pendulum Mode),该算法原理是根据所要达到的步长获得支撑腿切换时质心的位置,计算出质心到达上述位置所需要的时间,并根据该时间对摆动脚用正弦曲线进行规划, 使之能够在恰当的时刻到达所需的落脚点位置进行支撑脚的切换。该算法可以提高步行的灵活性,广泛用于四足机器人的步态规划中。
零力矩点(Zero Moment Point),是在机器人步态规划时计算机器人的ZMP,即在地面上存在一点P,使得与地面平行轴方向的、由惯性力F=ma与重力G所产生的净力矩为0的点,使得ZMP始终位于机器人足端与地面的多个接触点所围成的多边形内,从而使机器人获得静平衡状态。基于ZMP的稳定方法在双足和四足机器人已有广泛使用,但ZMP算法只适用于静态步态。
中枢模式发生器(Central Pattern Generator),是通过模拟生物的低端神经元生成步态规划。该方法利用数学方法生成振荡曲线,将其作为腿部关节的位置和速度输入,具备自稳定能力,同时也可以方便调节四足机器人腿间的相位关系。该算法虽然具有自稳定能力,但在面对复杂地形时,环境对机器人的扰动很大,该算法较难适用。
关键技术2:运动控制
利用优化算法对机器人的位置和关节力矩进行运动控制,从而实现机器人的动态稳定性和鲁棒性是实现运动控制的主要目标。针对复杂环境开发的四足机器人需要能够保证良好的跟踪性能和环境适应性的控制器,主要手段包括柔顺+前馈控制、层操作空间控制、模型预测控制、神经网络自适应控制等方法。神经网络自适应在四足机器人中的应用是实现其高效、合理运动控制的发展方向。
柔顺阻抗+前馈控制(Feedforwardtorque and impedance control),往往同时应用于四足机器人控制,使得四足机器人同时具有柔顺阻抗特性和快速的动态响应特点。通过主动或者被动的柔顺抗阻设计来调节机器人的作用力,使得机器人与地面接触时具有鲁棒性,同时通过检测驱动电机的输出电流完成关节力矩的前馈检测来实现四足机器人的快速动态响应是柔顺抗阻+前馈控制的总体控制框架。代表性应用为意大利理工学院的HyQ机器人。
分层操作空间控制(Object-based Storage Controller,OSC),是将复杂的机器人行为通过一组简单的最小二乘问题来描述。首先对系统进行动力学建模,建立期望运动、期望关节扭矩和期望地面接触力共3个优化变量,其中期望运动为最高优先级。之后采用分割优化的方法,利用线性算子将模型降阶,并利用QP求解器进行求解。最后再使用最小二乘法分别对三种任务进行优化。代表性应用为苏黎世联邦理工大学的StarlETH机器人。
模型预测控制(ModelPredictive Control,MPC),它的当前控制不需要建立复杂非线性机器人模型动作,而是在每一个采样瞬间通过求解一个有限时域开环最优控制问题而获得,当前的控制状态作为一个控制周期的初始状态,控制器的解作为第一个控制输出,本质上是一个求解开环最优控制问题的算法。代表性应用为MIT三代Cheetah机器人。
神经网络(NeuralNetwork,NN),可以实现对机器人动力学方程未知部分的精确逼近,从而实现无需建模的控制,则是近年来四足机器人研究领域的热点。

四足机器人运动控制框图
3.3环境感知和自主性
四足机器人的环境感知技术和自主化控制是其能够未来能够独立完成对外部环境的判断并协助人类在复杂环境下完成任务的重要技术手段。在环境感知方面,目前主要通过传感器技术实现,可分为本体感知传感器和外部感知传感器。本体感知传感器主要用于机器人内部状态的感知,包括对其运动性能、材料损耗等参数指标的感知,对机器人的正常运行起着实时监督作用。而外部感知则是通过视觉(例如摄像头)/非视觉传感器(例如激光雷达、超声波雷达等),实现测距、测速等功能。
而实时定位与建图(SimultaneousLocalization and Mapping,SLAM)是现阶段四足机器人能够实现自主性的关键,SLAM技术通过对传感器数据的融合,实现机器人在复杂环境中的定位并建立所需的环境地图。通过集成SLAM技术,机器人可以完成后续的导航、路径规划和实时避障,最终实现四足机器人的自主性运动。
3.4小结
提升性能和降低成本是推动四足机器人快速发展的关键力。在提升性能端,通过仿生结构优化和规划控制算法优化来不断增强四足机器人在复杂环境下的稳定性和鲁棒性是当前的主要技术手段;而在降低成本端,由于电机驱动系统和高精度传感器是四足机器人主要成本构成,在保证性能的前提下寻找更低成本的电机驱动方案和环境感知方案是能够有效降低四足机器人生产成本的方式。
4.四足机器人主要玩家
现阶段对于四足机器人的研究仍然以高校研究所为主,版本迭代、提升性能仍然是四足机器人的研究重点。也有少部分企业开始初步尝试四足机器人的商业化,包括波士顿动力、ANYbotics、宇树科技和云深处科技等,但目前各公司的产品仍然以面向如高校科研、特定用户为主,尚未规模商业化。下文将分别介绍四足机器人的主流玩家。
成立时间
所属国家/地区
代表性产品
美国马萨诸塞州
美国宾夕法尼亚
瑞士苏黎世
中国杭州
中国杭州
绝影
四足机器人主要玩家介绍
4.1波士顿动力(Boston Dynamics)

波士顿动力总部位于美国马萨诸塞州,由Marc Raibert于1992年成立。波士顿动力在2013年12月被Google收购,2017年6月又被软银以不公开的条款收购。波士顿动力现有产品线涵盖双足和四足机器人,代表性产品有双足机器人Atlas,四足机器人BigDog,Spot等系列产品。
BigDog系列
BigDog最开始发布于2005年,其长度约为1.1m,质量为75kg,最大负重可达154 kg。在运动参数上,BigDog可以4km/h速度连续运行10km,可爬35°斜坡,能以trot步态在冰面、石子地、雪地、沙地和积水路面行走,以crawl步态爬越空心砖堆,以bound步态跳过沟壑,在受到侧踹时可快速恢复平衡,是世界上第一款真正实现了野外行走的机器人。

Spot系列
波士顿动力陆续研发了多款spot系列机器人,最初在2015年发布的Spot是BigDog的改良版,由液压驱动,自重75kg,能够载重35kg。而2016年发布的SpotMini则已经迭代至电机驱动,在自重上也大大降低至30kg,实现载重14kg。2018年发布的新SpotMini产品在自重和外观上又有极大改进,具备更弯曲的四肢和灵活的移动性,同时也学会了用“嘴”开门和自动规划路线等功能。2019年9月波士顿动力正式发售SpotMini产品。

Ghost Robotics是依托宾夕法尼亚大学的私立四足机器人公司,核心团队来自宾夕法尼亚大学的GRASP(General Robotics, Automation, Sensing and Perception) Lab。Ghost Robotics的经典产品是Ghost Minitaur,该四足机器人机器人仅40cm长,自重6kg,最高时速为7.2公里,售价为10000美元。
而Ghost Robotics近期也研发了最新款四足机器人Ghost Spirit™ Series,用于代替停产的Ghost Minitaur,该系列主要用于R&D。同时还有Ghost Vision™ 和Wraith™Series,拥有更好的操作性和续航能力,适配于军事、工业、矿业和自然资源开发场景下的识别、检查和管理。

GhostRobotics主要产品线

ANYbotics正式成立于2016年,是苏黎世联邦理工学院的一个衍生产品,目标是将四足机器人ANYmal背后的技术商业化,目前公司拥有员工超过35名。从2011年起便推出了系列四足机器人产品,并在性能和应用场景上不断拓展和纵深。
早在2011年,ETH Zurich便推出StarlETH产品,该机器人体长约为0.5 m,段长为0.2 m,总重量为23kg,与中型犬相当。2015年推出了ANYmal Alph产品,被设计用于实际演示,具备模块化驱动和雷达导航功能。而2018年推出的ANYmal Beth,重新设计了驱动器和视觉系统,成为该公司第一代商用和离岸部署的机器人,主要用于海上平台检查与维护从而帮助降低平台运维的安全风险,并降低成本。
2019年8月,ANYbotics推出ANYmalC产品 ,新版机器人重量为50 kg, 移动速度为1m/s,可以爬20°的斜坡和 45°的楼梯,结构坚固且防尘防水可水下浸泡1小时,还具备强大的驱动装置,360°视野以及自主对接再充电功能,续航时间超过 2 小时。该产品预计在年底量产发售,初期主要客户为开发客户、工程合作伙伴和大学。
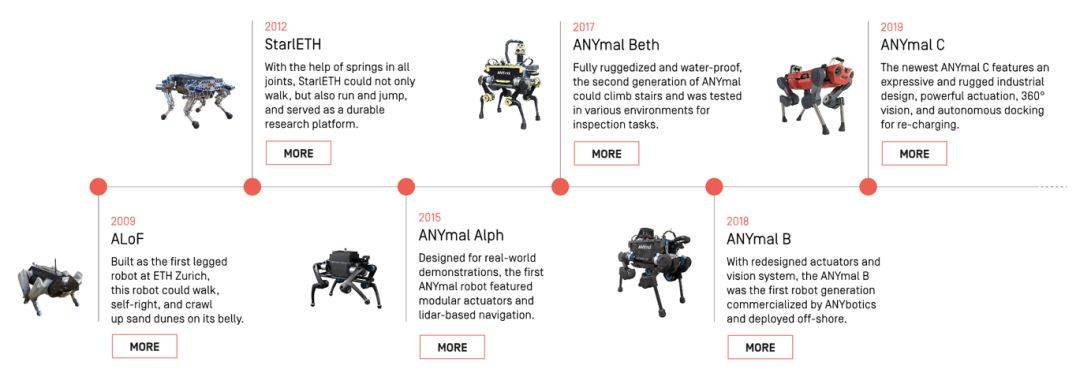
ANYbotics主要产品线
4.4宇树科技(Unitree)

宇树科技由创始人王兴兴创立于2016年,主要从事机电技术、控制技术和研发生产高运动性能四足机器人。公司提供整机方案和动力系统产品:整机方案包括Laikago和Laikago Pro系列,均能够实现约10kg的负重,奔跑速度能够达到1.4m/s,可以爬20°的坡,续航能力长达5小时;而提供动力系统产品包括大功率、大容量的电池包、高力矩质量密度PMSM电机和高性能电机驱动器。
宇树科技先后在2016年获得个人投资者数百万天使投资,在2018年获得安创资本、德迅投资等机构的股权投资。

宇树科技主要产品技术参数
4.5云深处科技(DeepRobotics)

云深处科技成立于2017年,是一家致力于智能四足机器人产品研发的创新型科技公司。“绝影”是其自主研发的智能四足机器人产品,具备行走、跑步、跳跃和倒地爬起等运动能力,也可适应台阶、斜坡、石子路、草地和雪地等非结构化地形,具有灵活的移动能力。同时,“绝影”通过搭载智能感知模块,可构建复杂环境的3D地图,具有精准的环境感知能力,以及智能的规划、决策与交互能力,可应用到智慧安防、电力/铁路巡检、物流运输、以及教育科硏等现实领域中。
现有“绝影”产品系列包括“绝影”、“绝影”mini和“绝影”Pro三大类。2019年10月,云深处发布新一代“绝影”产品,该产品身长85cm,站立时高达65cm,体重约40kg。新一代产品不仅在外观上具有更加柔和的流线型体感,同时运动性能和感知能力也得到了大幅度的提升:一方面,实现了在崎岖路面奔跑(Bounding),以及0.4m跳高与1.5m跳远(Jumping)的步态;另一方面,通过搭载用于定位的激光雷达,以及用于局部精细定位的摄像头,实现自主导航和动态避障,并能够在视觉系统辅助下实现自主充电(Autonomous Charging)。新“绝影”将不仅在日常的科研教学场景发挥作用,在安保、仓储物流、工程建设、应急响应等环境复杂的场景中,通过搭载的摄像头,以及各种检测传感设备,可以轻松执行巡检任务,真正发挥腿足机器人的优势。

云深处科技主要产品技术参数
公司核心技术人员主要有浙江大学、哈尔滨工业大学、台湾大学、浙江工业大学、以及德国慕尼黑工业大学和多特蒙德工业大学等国内外知名高校的博士和硕士,在智能机器人领域具有较强的竞争力。2018年7月,云深处科技获得银杏谷资本和道生投资数千万天使投资。
5.总结
经过数十年的研究和发展,四足机器人的运动性能和结构设计已经达到相对稳定和完善的阶段。但受限于现有的性能上限和生产成本,四足机器人在行业内的规模应用仍有不少距离,初期的市场落地仍然落足于高校科研,在野外运输救援、复杂环境安全巡检等领域的场景落地某种程度上仍是美好愿景。
但我们坚信,随着四足机器人运动规划控制的不断优化,自主感知能力的不断提升,以及整机硬件成本的不断降低,四足机器人的市场空间会不断打开,逐步找寻到更多的落地场景。或许在不久的将来,四足机器人便会成为人类工作和生活中不可或缺的一部分。
参考文献
[2]波士顿动力. https://www.bostondynamics.com/
[3]冯帅,孙增圻.基于LIPM的双足机器人变步长行走规划[J].东南大学学报(自然科学版),2009,39(S1):121-124.
[5]江磊.行走的智能:四足仿生移动机器人[J].测控技术,2019,38(04):7-10.
[6]姜秀梅. 仿生岩羊四足机器人的设计和步态仿真研究[D].中国科学技术大学,2019.
[7]廪实.仿生机器人 近似人类,高于人类,利于人类[J].互联网周刊,2018(06):60-61.
[8]孟健,刘进长,荣学文,李贻斌.四足机器人发展现状与展望[J].科技导报,2015,33(21):59-63.
[9]孙美娜,姜峰,李东.浅析StarlETH柔性仿生四足机器人[J].数字技术与应用,2014(04):203+205.
[10]汤少敏,刘桂雄,林志宇,李小兵.工业机器人伺服系统测试技术发展与趋势[J].中国测试,2019,45(08):1-7.
[11]吴国雄. 基于SLIP模型的四足机器人控制方法及实现[D].电子科技大学,2019.
[12]吴坤坤. 液压驱动双足机器人动步态行走研究[D].哈尔滨工业大学,2016.
[13]轩文龙. 电机驱动四足机器人单腿系统设计与实现[D].山东大学,2019.
[14]杨聪. 地震辅助救援四足机器人性能评价研究及其软件开发[D].北京工业大学,2016.
[15]杨钧杰,孙浩,王常虹,陈晓东.四足机器人研究综述[J].导航定位与授时,2019,6(05):61-73.
[16]宇树科技. http://www.unitree.cc/
[17]云深处科技. http://www.deeprobotics.cn/
[18]姚华,孙美娜,姜峰.浅析四足仿生机器人的研究现状及趋势[J].中国高新区,2018(13):16.
[19]中商情报网. 2019年中国特种机器人市场竞争格局及规模预测. http://www.askci.com/
[20]周坤玲. 四足仿生机器人高速步态规划方法研究[D].北京交通大学,2013.
[21]朱秋国.浅谈四足机器人的发展历史、现状与未来[J].杭州科技,2017(02):47-50.

长按图片 一键关注


初心资本成立于 2015 年,是一家以科技赋能为中心积极布局新兴业态的早期基金,成立至今已经完成近60家初创企业的投资,投资方向主要涵盖科技赋能、企业服务、教育和出海等领域,代表项目包括二手车消费金融美利金融、印度fintech公司Moneed、新型分布式数据库 PingCAP、视觉 PaaS 平台极视角、人工智能客服系统乐言、互联网互助保障社群水滴互助、工业机器人翼菲自动化、东南亚社区电商Fingo、可多人实时协作的云端Office石墨、智能数据及业务中台滴普科技、移动手术平台名医主刀、移动交友平台一周CP、少儿编程平台西瓜创客、企业数据和金融工作系统服务商企名片等。
我们关注创业的初心,希望在陪伴创业者共同成长的过程中,等待下一个指数级增长公司、下一位新生代的商业领袖,通过科技赋能,让我们的生活方式变得更美好。
推荐阅读
初心年会 | 流光溢彩 我们的时代初心行研 | 外骨骼机器人离我们有多远初心行研| 蓝海还是深海?水下机器人研究报告初心行研 |印尼市场启示录——步入深水区的出海市场初心年会 | 消费升级的真相与表象初心年会 | 新的大航海时代下的机遇与挑战
初心年会 | 新内容+新技术 畅想未来教育
初心行研|数学思维:新内容+新技术 赋予数学新的生机
初心行研 | 出海:一个绝对早期,5年级别的广阔赛道
初心行研|“少儿编程”不只是新奥数,而是新英语
初心行研|得到、知乎和喜马拉雅抢占风口,知识付费还有什么机会?(上)
初心行研|得到、知乎和喜马拉雅抢占风口,知识付费还有什么机会?(下)
初心行研|财富出海行业的困局与破局思考
初心发现|不一样的00后,我们读懂了吗?
初心资本田江川:找比我看得更远的人,投资他,信任他
