

据IPO早知道消息,橡木果机器人已于今年3月完成近亿元种子轮融资,领投方包括钱唐材料实验室、普华资本等知名投资机构。
成立于2024年底的橡木果机器人(Acorn Robot)核心团队融合清华大学机械工程与哈佛大学神经科学前沿交叉背景,其致力于为通用具身操作构建全新的技术基座,让机器人真正拥有与生俱来的类人本能与操作智慧。
事实上,橡木果团队自2011年起深耕机器人操作领域,2017年率先提出“本能驱动具身操作”这一非共识技术路线,并于2018年搭建实验室团队。2025年正式启动商业化,在短短一年内完成从技术积累到落地的闭环,以鲜明的底层技术逻辑,引领新一代具身智能发展范式。
尤为值得关注的是,橡木果现已走出了一条截然不同的技术路径——自下而上,从底层本能出发,让机器人先获取操作本能,继而在与物理世界的交互中自主涌现操作智能。
橡木果创始人表示:“如果有人问我们:‘你们的壁垒是什么?’ 我的回答很简单——我们的认知领先了行业至少一个代际,而我们的工程细节领先了行业至少5年。这两者叠加在一起,构成了一条坚固的护城河。”
“橡木果的长期目标,是成为全球具身智能领域不可或缺的底层基座。公司不追求成为什么都做的全能选手,而是专注于构建最底层、最关键的操作基石。公司坚信,未来的技术格局将是融合共生的:上层由大模型负责任务规划,解决‘做什么’;下层则由橡木果的本能驱动系统负责操作执行,解决‘怎么做’。二者通过标准化接口深度协作,共同构成真正通用、可靠的具身智能系统。”橡木果创始人说道。
普华资本表示,“橡木果所做的事,早已超越‘做一款更好的机器人’的范畴,而是在为整个具身智能行业构建一块最基础、最稀缺、最难被绕过的基础设施——让所有机器人都能快速上手、稳定动手的‘底层基座’。”
钱唐材料实验室表示,“我们相信,真正能穿越周期的,不是风口上的叙事,而是那些让机器人能在物理世界中稳定完成每一次抓取、每一次装配,从而真正创造价值的底层能力。”

任务规划与操作执行解耦
自下而上构建通用操作模型
不可否认的是,“任务”与“硬件”在泛化逻辑上的先天区别决定了,它们不能在同一个黑箱模型中训练,而应各自独立演进,通过标准化接口协同工作。
基于此,橡木果认为,应将任务规划与操作执行彻底解耦:
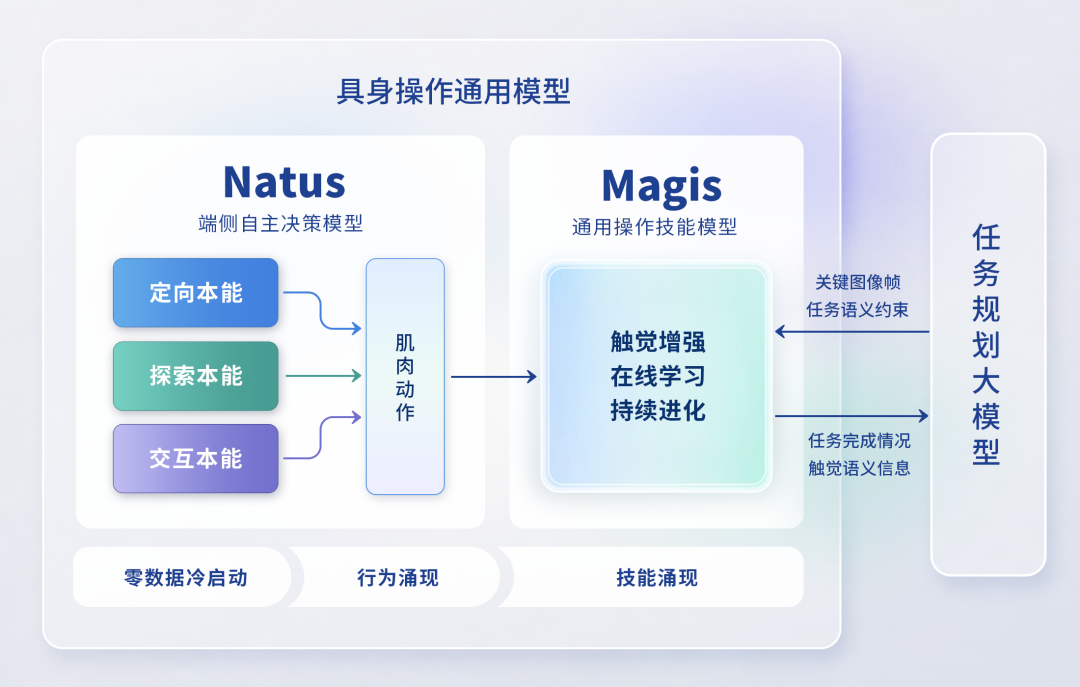
任务规划层:负责知识推理、任务分解和全局规划。可通过自上而下的知识学习,其输出并非具体的电机电流指令或关节角度,而是关键图像帧和语义约束。例如,对于“把这杯水端到桌上,不要洒”的任务,规划层输出的是一系列“物体开始在哪”、“物体最终应该落在哪”的目标画面以及“不要洒”的约束,而非末端执行器的具体动作路径。
操作执行层:负责将任务规划指令在真实物理世界中精准、鲁棒地执行。这是橡木果重点聚焦和突破的层面,由具身本能出发,采用了自下而上、自主涌现操作智能的技术路线。

在操作执行层面,橡木果的最终目标是构建通用操作技能模型,实现“一上来就熟练”。但技能无法凭空掌握。因此,在通向具身智能之前,橡木果先赋予机器人具身本能:通过构建端侧自主决策模型 Natus,让机器人获得类人的操作本能,催生行为涌现,保证“一上来就会做”;再依托真实物理世界中的探索与交互,不断熟练,最终构建第二个核心模型——通用操作技能模型 Magis,实现“一上来就熟练”。
端侧自主决策模型Natus:
零数据,冷启动,即插即用
从被赋予规则到掌握规律,橡木果认为,操作能力的来源,不应是数据拟合,而是物理世界中的具身交互。基于这一判断,橡木果摒弃了“输入-输出”的黑盒路线,转向由触觉感知驱动的本能驱动——这便是端侧自主决策模型 Natus 的底层逻辑。
Natus完全嵌在末端的执行器中,是一个由触觉刺激直接驱动的、毫秒级响应的端侧模型,其赋予机器人的核心能力是“零数据冷启动”、“硬件自适应”和“毫秒级响应”。它不需要任何训练数据,不需要任何微调,依靠本能反射构建触觉感知与肌肉动作之间的映射关系,出厂即具备操作的本能,能够适应不同物体和工况的特点,实现“一上来就会做”。进一步,可以在不断的探索过程中强化肌肉动作,形成肌肉记忆,实现“越做越熟练”。
正如疼痛反射不需要大脑思考,Natus让操作执行在物理世界中变得自然、流畅、鲁棒。

这些行为不是编程预设,也不是数据喂养得来,而是本能催生出的行为涌现。这种自下而上的行为涌现不直接规定动作,而是规定“规律”,让动作自主产生。
这种规律可以类比万有引力定律——万有引力定律本身不描述任何具体的运动轨迹,却支配了从天体运行到苹果落地的无穷行为。本能同样如此:它不规定具体动作,却支配了操作行为背后的底层逻辑。它让机器人在真实物理交互中拥有自主“长”出操作能力的可能性,而非被禁锢在一组预设的动作指令之中。
并且,由本能催生的行为,与数据喂养的路径截然不同——它不会附带任何多余的小动作,而是始终锚定于自身的本能期望,持续地向目标状态收敛。
通用操作技能模型Magis:
跨本体、跨任务的技能迁移与泛化
Magis的使命,是让机器人实现“一上来就熟练”。其实现路径颠覆了行业范式:不是用海量视频去“教”机器人,而是利用Natus在真实物理世界中自主探索产生的、带有丰富精准触觉语义的数据,对视觉数据进行语义增强,然后训练技能模型。
具体来说:当Natus驱动机器人在真实世界中完成一次成功操作时,它记录的不仅是“成功了”这一结果,更是一整套丰富的物理信息——物体的重量、质心的位置、表面的软硬与粗糙度、抓取时的力分布与滑移趋势等。这些由触觉直接感知并自动“打标”的力学语义,会被叠加对齐到视觉数据上,进一步被用于训练构建技能模型。
这种做法的好处是:1、训练数据需求大幅降低:无需百万小时级别的操作视频;2、模型理解深层物理属性:能泛化到从未见过的物体和场景;3、视觉追踪鲁棒性提升:触觉可告知“物体始终在手上”,视觉不会因遮挡或相似物体而跟丢。
Magis是操作智能涌现的重要标志,它将实现从“一上来就会做”到“一上来就熟练”的技能迁移。
触觉构建操作模型的信息底座
自研视触觉传感器已推出第三代产品
当然,构建本能要有完备的触觉信息输入。橡木果对触觉信息的分类极具系统性,远超市面上“测力”“测压”的粗浅理解。
操作相关的触觉信息则可分为界面信息(直接接触感知)、物体信息(通过界面间接感知)以及环境信息(通过工具或物体间接感知)三大类。

为了获取这些完备信息,橡木果自研了视触觉传感器(Vision-based Tactile Sensor),经过7年迭代、十余代原型机,已推出第三代成熟产品——该传感器采用弹性体(硅胶)加微型相机的方案,不依赖任何敏感材料,通过图像表征与重构算法将弹性体的变形反演为所需的多模态触觉信息。
然而,真正的技术壁垒不在于原理样机,而在于:
•多模态表征技术:橡木果拥有静态(光度立体)、动态(特征追踪)、融合态三类表征技术,其中,动态表征技术由橡木果于2020年首次提出,可用于捕捉滑移这一动态过程,而行业直至2025年底才开始跟进。
•工艺与工程化标定:攻克了从图像到物理量的非线性、黏弹性逆问题求解与精准标定,以及千万次按压、切向、旋转循环测试下的耐久性保证等。
•算力集成与优化:将图像预处理算法压缩到指尖内的芯片,优化信息重构算法,可实时输出多模态、标准化的触觉信息,而非原始图像——避免了硬件差异性导致模型失效。
非共识路线已获商业化验证
要为具身智能产业打造真正的“操作基座”
整体而言,橡木果开创的“本能驱动”这一具身操作技术路线,让机器人的“成长”路径,从“数据填鸭”转向“体感习得”,并理解物理世界操作中的“公理”。使操作技能从“单一场景的记忆”走向“底层规律的迁移”。这种从“记忆”到“理解”再到“创造”的跃迁,正是迈向通用智能的必经关卡。
当然,橡木果的技术路线现已经过了商业化验证。目前,橡木果聚焦于工业柔性生产场景(如消费电子、日化、新能源汽车、生物医药),针对性解决产线“换产频繁、物料繁杂、参数调试耗时”的行业痛点。
凭借Natus的“零数据冷启动”特性,橡木果的解决方案可以做到冷启动、快速闭环。项目落地效率突出,仅用两个月时间,即在全球某头部化妆品ODM厂商的产线上完成了POC验证,并实现商业营收。在POC中,机器人被要求抓取、旋拧和放置形状、大小、材质各异的化妆品(软管、瓶状、盒状等),其零数据、快速适配的能力赢得了客户的高度认可。
团队表示:“工业场景对任务规划的要求相对固定,每个工位的任务已被既定。这恰恰是我们的技术优势发挥到极致的地方。我们不需要等待上层大模型成熟,就能用底层的操作能力产生商业价值。” 随着模型的不断迭代与产品大规模出货,橡木果正试图为具身智能产业打造真正的“操作基座”。






小马智行|地平线|文远知行 蜜雪冰城|古茗|沪上阿姨 极智嘉|云迹科技|特斯联

