伴随着人工智能的发展,各式各样的服务机器人已在我们的日常生活及工作环境中出现。服务机器人能实现大面积普及,与相关核心技术的发展密不可分,激光SLAM在其中就扮演了重要角色。
在实现服务机器人智能行走中,激光SLAM与视觉SLAM正成为当下不可绕开的话题。早在05年的时候,激光SLAM就被研究的比较透彻,框架也初步确定。而如今,激光SLAM已成为目前最稳定、主流的导航方式。
作为业内领先的激光SLAM技术提供商,思岚
科技
始终坚持一个很重要的原则,那就是8/2原则。20%用来研究核心理论,80%则是如何实现技术方案的落地,比如成本及可靠性的问题。

在激光SLAM的实际应用中,机器人应对环境的准确定位、障碍物的有效规避及环境变化后的重定位等是其实现智能行走中不可避免的问题,针对这些问题,思岚科技都能很好的解决。
1、应对准确环境的地图构建
构建高精度地图是机器人实现自主定位导航的第一步,也直接影响后续机器人执行任务的效率,在对环境的准确构建上,思岚科技目前主要包含激光雷达和SLAM算法两方面:①激光雷达传感器的构建精度;②SLAM算法应对大地图的构图能力。
激光雷达传感器的精度直接影响了机器人地图构建的精度,为实现机器人的理想化构图,思岚科技在激光雷达传感器中花了不少功夫。如突破三角测距20米局限;采样频率突破上万次大关;高达0.33°(15hz情况)的角度分辨率…。无论在距离测量还是精度上都能满足商用服务机器人的实际使用需求。
与雷达同步迭代的还有思岚科技的SLAM算法,思岚科技采用最新图优化的方式,可直接满足用户预期,无需二次修正就能直接使用。即使是百万平米的建图也同样能满足高精度要求下的实时定位需求。
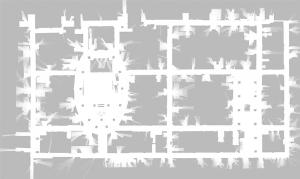
以上是使用思岚激光SLAM技术构建的地图效果,未经任何后期处理,我们可以看到墙壁的边缘都非常规整,没有任何噪点。这样的地图进行简单的修饰就可直接放在
手机
APP上进行使用。
2、应对障碍物的有效规避
机器人在实际应用中,会碰到各种不同的障碍物:有固定不变的,随机移动的,甚至是突然出现的。当然还有些像玻璃镜子等高透明材质的障碍物,这些都需要机器人拥有强大的感知及识别能力,保证机器人能有效规避障碍物。
在应对障碍物的有效规避中,思岚科技除了利用到自主研发的激光SLAM的同时,还采用了多传感器融合技术,如深度摄像头、超声波、防跌落、防碰撞等传感器,辅助机器人进行障碍物的有效识别及规避。

激光SLAM是当下实现机器人定位导航的核心技术,但要实现复杂场景下障碍物的有效规避,多传感器融合是未来的必然趋势。
3、应对环境变化后的可靠重定位
当机器人遇到障碍物后,行走环境也会相应的发生一些改变,这时机器人在面对变化后的环境需要拥有可靠的重定位功能。重定位有两个问题,第一个是人启动的时候重定位,还有一种重定位是环境变化非常多的时候可靠定位。对机器人而言,面临的直接挑战有三点:
①若周边环境的重复性较少,且无闭环性检测时,地图则偏差比较大;②定位效果会变差;③计算复杂程度会变大。所以,显而易见,当机器人发生环境变化时,我们要解决的是如何降低计算机的难度,提升算法的精确性。
思岚科技利用多重数据和算法模型,加之自主研发的全局重定位功能,使机器人在面临复杂环境时保证可靠定位且不迷失。
除了环境变化之外,温度变化也是常见的环境变化之一。思岚的激光雷达传感器在出厂前都经过严格的测试,应对工作温度区间内的各类复杂环境。
4、理解环境中的逻辑概念
对于机器人来说,逻辑等于操控指令,强大的逻辑理解能力能帮助机器人更好的完成任务。机器人在移动过程中,严谨的思维逻辑能力还不完善。那如何在规定的活动范围和活动路线上行驶呢?针对这一问题,思岚科技利用RoboStudio机器人管理软件设置虚拟墙及虚拟轨道。
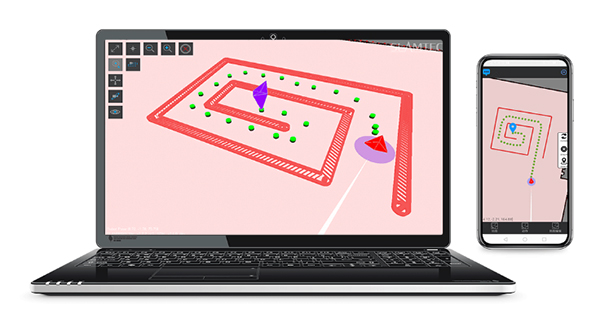
除此之外还有些实际应用场景,比如说多涂层和POI,POI就是兴趣点,比如商场的平面图,地图上标识的是每家店铺的名称,它肯定不是平面图。所以在软件上我们会做很多的修改,比如在地图上我们允许加一些兴趣点,POI的信息,另外我们也支持多涂层叠加,更好的运用到商场服务中去。
以上就是思岚科技基于8/2原则在做的事情,将80%的精力用在解决机器人实际场景中的复杂问题。未来,思岚科技也将坚持以实现机器人智能行走为初心,为业界提供更多有效解决方案,加速服务机器人智能化进程。
